Digitaler
Motorweichendecoder
MWD-1
MM
Allgemeines
Der Motorweichendecoder
MWD-1 funktioniert auf Grundlage des Märklin*/Motorola*-Datenformates und kann deshalb vom Märklin* Digital-System
bzw. Systems (CS) sowie von allen Zentralen und Computerprogrammen geschaltet
werden, die das MÄ/Motorola* Format ausgeben.
Das Motorola*-Format
sendet stets nach einem Stellbefehl einen Abschaltbefehl, sofort wenn die Taste
am Keyboard losgelassen wird. Damit eine Weiche sicher umlegt verfügen die
Zentralen deshalb alle über eine Mindestschaltzeit. So wird auch bei nur ganz
kurzem Druck auf eine Taste ein ausreichend langer Stellbefehl erzeugt. Die
Mindestschaltzeit der Ausgänge ist abhängig von der verwendeten Zentrale und
beträgt ca. 150 - 200 ms. Bei vielen Zentralen
ist die Mindestschaltzeit auch
konfigurierbar. Schauen Sie deshalb bitte in die Anleitung der von Ihnen
verwendeten Zentrale.
Der MWD-1 erzeugt den
Stellimpuls so lange wie er den Befehl dazu bekommt. Die Länge des Tastendrucks
am Keyboard bestimmt die Länge der Verfahrenszeit der Antriebe Eine Abschaltung
der Ausgänge wird durch den Decoder selber nicht vorgenommen. An den Decoder
können ausschließlich Motorweichenantriebe der Fa. Conrad*/Hoffmann* (alt)
angeschlossen werden. Weitere auf dem Markt befindliche motorische
Weichenantriebe oder auch Servomotoren können mit diesem Decoder nicht
betrieben werden!
Bei den anzuschließenden
Antrieben handelt es sich zwar um motorische Antriebe, sie “benehmen“ sich aber
wie Spulenantriebe in handelsüblichen Weichenantrieben. Bereits eine Schaltzeit
von ca. 150 ms reicht aus um die Motorweichenantriebe umzuschalten.
Grundsätzlich können Sie
auch Antriebe von Hoffmann* der neuen Ausführung in Betrieb nehmen, jedoch
haben diese Antriebe in der längsten einstellbaren Schaltzeit eine
Verfahrenszeit von ca. 1 sec. Um einen
solchen Antrieb umschalten zu können müssten Sie in der Tat die Taste am
Keyboard eine Sekunde lang gedrückt halten, denn eine so lange Schaltzeit
erzeugt der MWD-1 nicht von alleine durch kurzes Drücken auf eine
Keyboardtaste. Die Zentrale sendet vorher einen Abschaltbefehl. Wollen Sie
dennoch die neue Ausführung von Hoffmann* anschließen, dann sollten Sie den
Antrieb auf die kürzeste, mögliche Verfahrenszeit einstellen.
Die “alte“ Ausführung der
Motorweichenantriebe von der Fa. Hoffmann* unterscheidet sich kaum von den
Antrieben von C*. Deshalb gilt oben Gesagtes auch für diese
Motorweichenantriebe.
Grundsätzlich können Sie
auch Antriebe von der Fa. Hoffmann* der neuen Ausführung in Betrieb nehmen,
jedoch haben diese Antriebe in der längsten einstellbaren Schaltzeit eine
Verfahrenszeit von ca. einer Sekunde.
Um einen solchen Antrieb umschalten zu können müssten Sie die Taste am Keyboard eine Sekunde lang
gedrückt halten. Sofern Sie das nicht wünschen oder können, z.B. beim
Automatikbetrieb, dann sollten Sie diese Antriebe auf die kürzeste, mögliche
Verfahrenszeit einstellen. Dabei wäre dann allerdings das häufig gewünschte,
langsame Umlegen der Weichen nicht mehr gegeben.
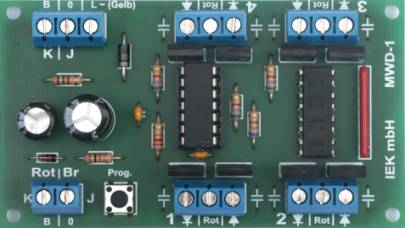
Anschluß des
Decoders
Den Anschluß des Decoders an Ihr
Digitalsystem können Sie gleichermaßen von der Zentraleinheit oder vom Gleis
vornehmen. Verbinden Sie dazu die linken Anschlüsse mit dem System. Der
Anschluß “B“ wird mit dem rotem Kabel der Zentraleinheit (CS, CU, Int.Box) oder dem entsprechendem
Schienenstrang verbunden, der Anschluß
“0“ mit dem braunem Kabel der Zentraleinheit oder der allgemeinen Bahnstrommasse
bzw. dem anderem Schienenstrang.
Ob Sie jedoch die oberen oder unteren
Anschlussklemmen des Decoders hierfür benutzen ist unerheblich, da diese
Anschlüsse parallel miteinander verbunden sind. Im Regelfall werden diese
Anschlußbuchsen zur Weiterführung des Digitalsignals zum nächsten Decoder
benutzt.
Die Buchse mit der Bezeichnung “L“
schließen Sie an einen externen Transformator mit 12-16 V ~ an, Ausgang “L“, Lichtstrom, Kabelfarbe gelb.
Das Massekabel des externen Transformators, Farbe braun oder blau, je nach
Trafotype, muß mit der allgemeinen Bahnstrommasse oder direkt am Decoder,
Klemme “0/Br“ verbunden werden.
Die Motorweichenantriebe werden mit dem rotem Kabel jeweils in der
Mitte der 3 er-Klemmleiste verbunden. An den braunen Kabeln befinden sich
Dioden. Diese Kabel müssen entsprechend
der Bezeichnung am Decoder richtig herum angeschlossen werden. Bei vertauschtem
Anschluß funktionieren die Antriebe nicht!
Defekte entstehen dadurch aber nicht.
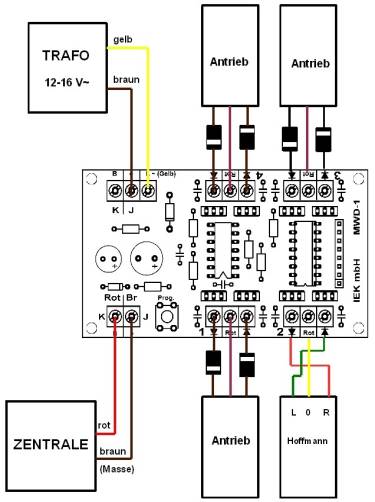
Bei Antrieben von Hoffmann* sind die Dioden
bereits im Antrieb enthalten. Auf den Antrieben befinden sich Klemmen die
mit den Buchstaben “L“, “0“ und “R“ bezeichnet sind. “0“ muß
mit der mittleren, “R“ mit der linken und “L“ mit der rechten Anschlussklemme
des Decoders verbunden werden. Sollten irrtümlich die Anschlüsse “L“ und “R“
vertauscht werden, dann bewegt sich der Motorantrieb ständig hin und her,
Defekte entstehen allerdings auch hier nicht.
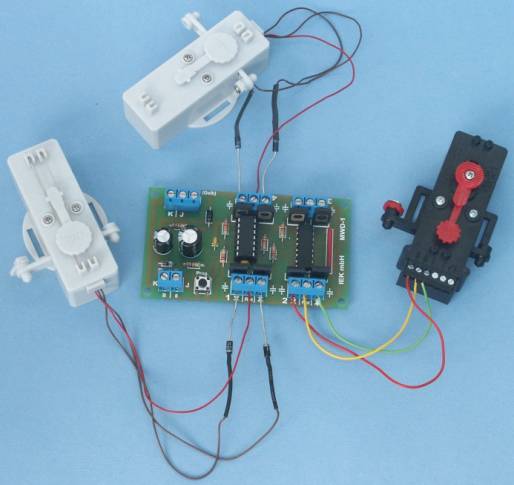
In der Realität sähe das dann
so aus.
Der Programmiervorgang
Der Decoder verfügt über
eine Einzelprogrammierung. Sie können
jedem Ausgang eine beliebige Adresse zuweisen. Die Ausgänge sind nicht in
Blöcken zu jeweils vier Adressen zusammengefasst. Auch können Sie die “Schaltrichtung“ selber bestimmen. So
ist es Ihnen überlassen, ob z.B. der linke Anschluß ( Diode “Pfeil raus“
) einer jeweiligen Anschlussklemme auf den Befehl “rot“ oder “grün“ reagiert.
Schalten Sie die
Spannung wieder ein. Bereiten Sie Ihr
Keyboard bzw. die Zentrale mit den gewünschten Adressen vor. An der Zentrale
selber brauchen Sie nicht den Programmiermodus zu aktivieren und die Hinweise
zum Programmieren mit CV-Einstellungen usw. zu beachten. Das ist für diesen
Programmiervorgang hier völlig ohne Belang.
Sie müssen lediglich den einzelnen Tasten die als Keyboard fungieren die von Ihnen gewünschten Adressen zuweisen.
Alternativ müssen Sie die Möglichkeit der Abgabe von Stellbefehlen mit den
gewünschten Adressen am PC vorbereiten.
Betätigen Sie den
Programmiertaster “Prog“, der Decoder
befindet sich im Programmierzustand. Der Antrieb am Ausgang “1“
beginnt sich rhythmisch hin und her zu bewegen. Geben Sie nun einen
Weichenstellbefehl mit der gewünschten Adresse ab um dem Decoder am Ausgang “1“
die Adresse zuzuweisen, z.B. vorbereitetes Tastenpaar mit der Adresse 7, rote Taste. Nach erfolgtem,
gegebenem Tastendruck vom Keyboard (Stellbefehl am PC) ist diese Adresse nun am
Ausgang “1“ gespeichert.
Die
“Farbe“ der Taste die beim Programmieren gedrückt wird bestimmt die
Schaltrichtung. Bei Druck auf “grün“
reagiert der rechte Anschluß der 3-er
Klemme (Diode “Pfeil rein“) auf
grün, der Linke dann auf “rot“, (Diode “Pfeil raus“), bei Druck auf “rot“ reagiert der rechte Anschluß
(Diode “Pfeil rein“) auf “rot“ und der Linke auf “grün“.
Nun beginnt der zweite
Antrieb sich zu bewegen. Das ist gleichzeitig der Hinweis, dass der Decoder die
erste Adresse “verstanden“ hat. Gehen
Sie beim zweitem Ausgang genau so wie oben beschrieben vor, einfach einen
Weichenstellbefehl mit der gewünschten Adresse abgeben, Gleiches machen Sie für die Ausgänge “3“ und
“4“.
Die
vergebenen Adressen müssen notwendigerweise !nicht! fortlaufend sein. So
ist z.B. bei einem Decoder die Adressvergabe “21“, “298“, “69“ und “1“ für die
einzelnen Ausgänge denkbar.
Nach
Programmierung der Ausgänge sind die Adressen dauerhaft gespeichert. Sollte es
der Fall sein, dass ein Antrieb “falsch“ herum reagiert, also beim Druck auf
die grüne Taste die Weiche rund gestellt wird, so haben Sie die Möglichkeit,
den Decoder “anders“ herum zu programmieren. J
Wiederholen Sie den Programmiervorgang und drücken dann bei der neuen
Programmierung einfach die andere Taste am Keyboard für den Antrieb, der anders
herum schalten soll.
Haben
Sie beispielsweise den Decoderausgang
“2“ bei der Erstprogrammierung den Stellbefehl mit der grünen Taste
abgegeben, dann müssen Sie bei der Zweitprogrammierung für den Decoderausgang
“2“ den Stellbefehl mit der roten Taste abgeben.
Der Programmiervorgang
kann beliebig oft wiederholt werden, so dass Sie jederzeit die Möglichkeit
haben den einzelnen Ausgängen neue Adressen zuzuweisen.
Die Antriebe
Es
soll Leute geben, die Vorbehalte bezüglich der Qualität gegenüber den hier zu
schaltenden Antrieben haben. Für Puristen unter den MoBa-Freunden sind diese
Antriebe in der Tat vielleicht etwas zu simpel, da die Antriebe, entgegen den
Gepflogenheiten sonstiger Motorantriebe, die Weiche sehr schnell umlegen. Das
Ganze geht auch noch mit einem relativ
hohem Geräuschpegel einher. Aus Erfahrung wissen wir jedoch, dass dieser
Umstand anderen MoBa-Freunden wiederum weitesgehendst egal ist. Es wird nach einer preiswerten und zuverlässigen
Umschaltung für Weichen gesucht.
Bei
den Dauertests nach der Entwicklungsphase der MWDs wurden zum Abschluß hin 3 x
10.000 Schaltzyklen für jeden Ausgang durchgeführt. Die MWDs müssen einer
solchen Belastung standhalten. Ohne
Probleme überstand der Proband diese Tortur, die angeschlossenen
Motorweichenantriebe allerdings auch! Besagte Antriebe funktionieren noch heute
einwandfrei. Soviel mal zum Thema Standfestigkeit und Zuverlässigkeit der
“billigen“ Motorweichenantriebe.
Aufgrund
der Verhältnisse unter der Platte und der damit verbundenen Einbaulage des
Antriebes könnte es vorkommen, dass ein Umlegen des Antriebes nach rechts die
Weiche gerade stellt oder anders herum. Eine Veränderung der Stellrichtung “rechts/links“
kann !nicht! durch vertauschen der Anschlusskabel der Antriebe am
Decoder vorgenommen werden! Problemlos ist die Veränderung der Stellrichtung
durch Änderung der Programmierung, wie oben beschrieben, möglich. Wurde z.B.
mit der Taste “ROT“ programmiert, so
muß lediglich der entsprechende Ausgang mit der Taste “GRÜN“ noch einmal programmiert werden. Auf die Einbaulage der
Antriebe brauchen Sie deshalb nicht zu achten. Gemäß Murphy’s Gesetzt ist
nämlich immer gerade dort eine Verstrebung wo man eigentlich gedachte den
Antrieb einzubauen. J
Ab
einer Schaltzeit von ca. 150 m sec. stellen die Antriebe sicher um. Es
gibt Zentralen, bei denen können die
Mindestschaltzeiten für angeschlossene Weichen eingestellt werden. Sollten Sie
eine solche Zentrale verwenden, so stellen Sie die “min. Schaltzeit“ auf ca.
200 m sec. ein. Bei vielen Zentralen können die Schaltzeiten für einzelne
Weichen nicht individuell eingestellt werden, sondern die Stellzeiten sind
verbindlich für alle an die Zentrale angeschlossenen Weichen. Würden Sie z.B.
die “min. Schaltzeit“ auf eine Sekunde einstellen, so würde das zu einer
erheblichen Verlangsamung der Schaltvorgänge des gesamten Systems führen, da
jeder Stellbefehl eine Sekunde lang
gesendet wird. Erst nach Ablauf jeweils einer Sekunde würde der nächste
Stellbefehl gesendet werden.
Bei
vielen Computerprogrammen besteht die Möglichkeit die Schaltzeiten für jede
Weiche einzeln einzustellen. Sollten Sie über so eine Möglichkeit verfügen,
dann können Sie hier für die Motorantriebe durchaus längere Stellzeiten als 200
ms. einstellen.
Es lassen sich mit dem
MWD-1 auch Antriebe der Fa. Hoffmann*, letzte Generation, verwenden. Diese
Motorantriebe können auf eine Verfahrenszeit von ca. 200 m sec. – 1 sec. am
Antrieb selber eingestellt werden. Sofern Sie die kürzeste Schaltzeit
einstellen, so kann auch dieser Antrieb problemlos mit dem MWD-1 betrieben
werden. Das langsame Umlegen der
Weichen ist dann allerdings nicht gegeben. Als weitere Möglichkeit kann die
Mindestschaltzeit durch die Zentrale entsprechend erhöht werden. Diese Maßnahme
empfiehlt sich allerdings lediglich für
Zentralen oder Computerprogramme, bei denen für einzelne Weichenadressen eine
individuelle Mindestschaltzeiteinstellung möglich ist. Sollten Sie ein Keyboard
benutzen, so könnten Sie die Taste 1 sec. lang gedrückt halten.
Für die Zeit des
anstehenden Stellbefehls fließt Strom
zum Umschalten der Antriebe. Nach Ablauf dieser Zeit wird der Strom wieder
abgeschaltet. Die Antriebe sind im Ruhezustand stromlos.
Durch die Verwendung des Decoders werden die Antriebe massekompatibel. Das bedeutet, Sie können die Motorantriebe mit dem Decoder umschalten und zusätzlich, parallel z.B. mit einem Stellpult, Mä 7271/2, manuell oder mit einem Gleisbesetztmelder mit Relais, IEK GBM-R, durch den fahrenden Zug die Weichen umschalten. Erforderlich ist lediglich dass die parallelen Umschalteinheiten potentialfreie Momentkontakte (Taster) sind und nach Masse schalten.
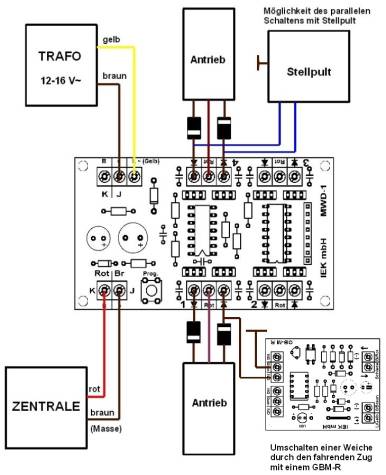
Schematisch abgebildet ist hier die
parallele Umschaltung eines Antriebes mit dem Decoder sowie mit einem
handelsüblichem Stellpult und einem
GBM-R, wobei jeweils nach Masse geschaltet wird.
Praxistip
Der MWD-1 erzeugt einen
kräftigen Umschaltimpuls. Das quittieren die Antriebe mit einem deutlich
vernehmbarem “Klack“, der vielen MoBa-Freunden zu laut ist. Deshalb kann der
externe Transformator durchaus weniger Spannung als die üblichen 16 V~
ausgegeben. Auch ist es denkbar, dass Sie lediglich Transformatoren mit mehr
als 16 V~ zur Verfügung haben. Um die Spannung entsprechend zu vermindern, ohne
daß es zu einem Leistungsabfall kommt,
können Sie eine Diodenkaskade in Reihe zu der Anschlussleitung schalten. Das
sind jeweils zwei antiparallel geschaltete Dioden. In Abhängigkeit der Anzahl
der Dioden reduziert sich die tatsächlich Spannung dann pro Paar jeweils um ca.
0,7 V. Diese Maßnahme ist nur einmal für alle an den Transformator
angeschlossenen Decoder erforderlich. Allerdings müssen weitere MWD-1 dann von
den Anschlüssen des ersten angeschlossenen Decoders versorgt werden. Zur
Spannungsreduzierung ist das Vorschalten eines Widerstandes anstatt einer
Diodenkaskade nicht empfehlenswert.
Sollten durch die
Verwendung der Motorantriebe Störungen
entstehen, so können Sie in den freien Stellen auf der Platine Kondensatoren,
100 nF, zur zusätzlichen Entstörung einlöten.
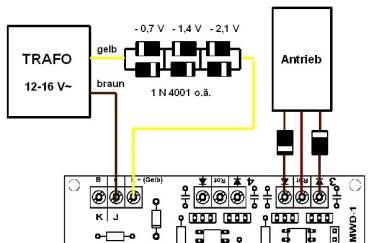
Beispielhaft
wurde hier eine Diodenkaskade mit insgesamt sechs Dioden aufgezeigt. Es können
aber durchaus mehr als die hier gezeigten Dioden sein. Sollten die Antriebe
allerdings “schlapp“ machen, dann war es mindestens ein Pärchen zu viel.J
Technische Daten
Baustein
Datenformat: Motorola
Adressvorrat: 320 Einzeladressen
Max.
Ausgangsstrom, Impulsbetrieb:
1,5 A
Max. externe
Betriebsspannung: 16 V~
Funktion :
Baugruppe, 8 Impulsausgänge, gegenläufige
Schaltimpulse
Maße: ca. 49x88 mm