Digitaler
Motorweichendecoder
MWD-2
MM
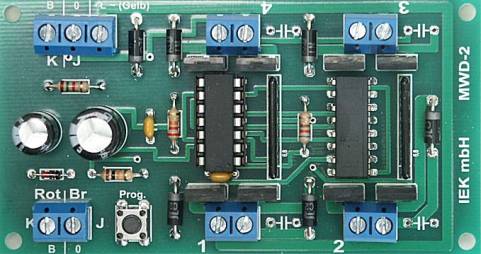
Artikelnr.: 040704-28
Betriebsanleitung
Allgemeines
Der Motorweichendecoder
MWD-2 funktioniert auf Grundlage des Motorola Datenformates und kann deshalb von allen Digitalzentralen
sowie PC-Programmen geschaltet werden die das MM-Format bzw. Märklin-Systems
(CS) ausgeben.
Der MWD-2 ist geeignet zur
Ansteuerung aller gängigen motorischer Weichenantriebe, z.B. Conrad/Hoffmann, Fulgurex, Pilz und
Tillig.
Er erzeugt immer einen
Stellimpuls von ca. 5 Sekunden Länge, ganz gleich wie lange die Stellzeiten in
Ihrer Zentrale bzw. Ihres PCs eingestellt sind.. Danach wird der Strom
abgeschaltet. Auf diese Weise werden die Endabschaltungen der jeweiligen
motorischen Antriebe entlastet.
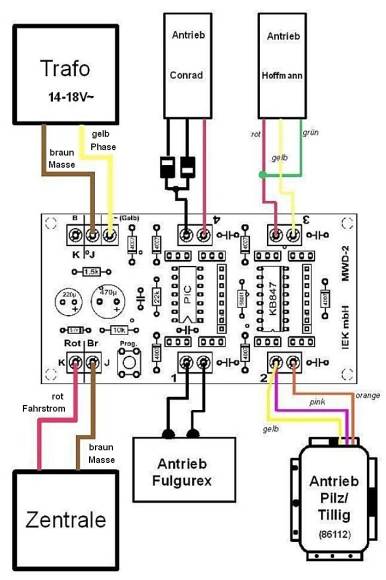
Anschluß des Decoders
!! Schalten Sie zunächst die Spannung Ihrer Anlage ab!!
Den Anschluß des Decoders an Ihr
Digitalsystem können Sie gleichermaßen von der Zentraleinheit oder vom Gleis
vornehmen. Verbinden Sie dazu die linken Anschlüsse mit dem System. Der
Anschluß “B“ wird mit dem rotem Kabel der Zentraleinheit ( CS, MS, Int.Box, ) oder dem entsprechendem
Schienenstrang verbunden, der Anschluß
“0“ mit dem braunem Kabel der Zentraleinheit oder der allgemeinen
Bahnstrommasse bzw. dem anderem Schienenstrang. Ob Sie jedoch die oberen oder
unteren Anschlußklemmen hierfür benutzen ist unerheblich, da diese Anschlüsse
parallel miteinander verbunden sind. Im Regelfall werden diese Anschlußbuchsen
zur Weiterführung des Digitalsignals zum nächsten Decoder benutzt.
Die Buchse mit der Bezeichnung “L“
schließen Sie an einen externen Transformator mit 14-18 V ~ an, Ausgang “L“, Lichtstrom, Kabelfarbe meistens
gelb. Das Massekabel des externen Transformators, meistens Farbe braun oder
blau, je nach Trafotype, muß mit der allgemeinen Bahnstrommasse oder direkt am
Decoder, Klemme “0/Br“ verbunden
werden. Es muß ein Transformator sein der Wechselspannung ausgibt, mit einem
Gleichspannungsnetzteil funktioniert der Decoder nicht!
Die Motorweichenantriebe werden mit den beiden Kabeln jeweils mit den
2er Klemmleiste verbunden. Wie herum ist für die Funktion grundsätzlich
unerheblich. Jedoch bewegen sich die motorischen Antriebe in Abhängigkeit des
Anschlusses "rechts" oder "links" herum. Sollten sich die
Antriebe für Ihre Belange "falsch" herum bewegen, so vertauschen Sie
einfach die Anschlußkabel an den Klemmen.
Bei vielen Antrieben, z.B. von Conrad,
Hoffmann und Pilz/Tillig müssen Sie aus den drei vorhandenen Anschlußkabeln
"zwei" machen. Diese nun
erhaltenen “zwei Kabel“ verbinden Sie dann mit den zweipoligen
Anschlussklemmen.
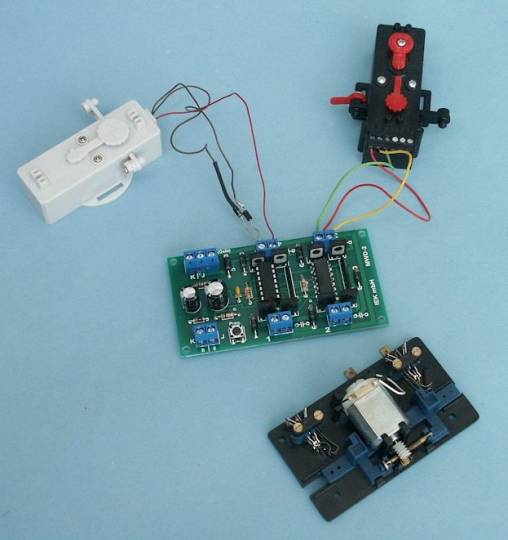
In der Realität sähe das so
aus.
Der
Programmiervorgang
Der Decoder verfügt über
eine Einzelprogrammierung. Sie können
jedem Ausgang eine beliebige Adresse zuweisen. Die Ausgänge sind nicht in
Blöcken zu jeweils vier Adressen zusammengefasst. Auch können Sie die “Schaltrichtung“ selber bestimmen. So
ist es Ihnen überlassen, ob z.B. der linke Anschluß einer jeweiligen Anschlussklemme auf den Befehl “rot“ oder
“grün“ reagiert. Auf diese Weise können Sie sich das manuelle Umpolen der Kabel
an den Anschlußklemmen ersparen.
Bereiten Sie Ihr Keyboard
bzw. die Zentrale oder die Software mit den gewünschten Adressen vor. An der
Zentrale selber brauchen Sie nicht den Programmiermodus zu aktivieren und die
Hinweise zum Programmieren mit CV-Einstellungen usw. zu beachten. Das ist für
diesen Programmiervorgang hier völlig ohne Belang. Sie müssen lediglich den einzelnen Tasten die als Keyboard
fungieren die von Ihnen gewünschten Adressen zuweisen.
Schalten Sie die
Spannung wieder ein. Betätigen Sie den
Programmiertaster “Prog“, der Decoder
befindet sich im Programmierzustand. Der Antrieb am Ausgang “ 1“
beginnt sich rhythmisch hin und her zu bewegen. Geben Sie nun einen
Weichenstellbefehl mit der gewünschten Adresse ab um dem Decoder am Ausgang “
1“ die Adresse zuzuweisen, z.B. vorbereitetes Tastenpaar mit
der Adresse 7, rote Taste. Nach
erfolgtem, gegebenem Tastendruck vom Keyboard (Stellbefehl am PC) ist diese
Adresse nun am Ausgang “ 1“
gespeichert.
Die
“Farbe“ der Taste die beim Programmieren gedrückt wird bestimmt die
Schaltrichtung. Bei Druck auf “rot“
läuft der Motorantrieb, je nach Anschluß der Kabel rechts oder links herum. Bei
Druck auf “grün“ läuft er dann genau
anders herum.
Nun beginnt der zweite
Antrieb sich zu bewegen. Das ist gleichzeitig der Hinweis, dass der Decoder die
erste Adresse “verstanden“ hat. Gehen
Sie beim zweitem Ausgang genau so wie oben beschrieben vor, einfach einen Weichenstellbefehl
absetzen, ebenso für die Ausgänge “3“ und “4“.
Die
vergebenen Adressen müssen notwendigerweise !nicht! fortlaufend
sein. So ist z.B. bei einem Decoder die Adressvergabe “21“, “208“, “69“ und “1“
denkbar.
Nach
Programmierung der Ausgänge sind die Adressen dauerhaft gespeichert. Sollte es
der Fall sein, dass ein Antrieb “falsch“ herum reagiert, also beim Druck auf
die grüne Taste die Weiche rund gestellt wird, so haben Sie die Möglichkeit,
wie beschrieben, den Decoder anders herum zu programmieren. J
Dazu muß nicht der gesamte
Programmiervorgang wiederholt werden, sondern nur der für den entsprechenden
Ausgang. Möchten Sie beispielsweise den Ausgang “3“ neu programmieren, so gehen
Sie wie folgt vor:
Drücken
Sie den Programmiertaster. Der Antrieb des Ausgangs “1“ beginnt sich zu
bewegen. Drücken Sie wiederum den Programmiertaster. Dadurch wird der
Programmiervorgang für den Ausgang “1“ “übersprungen“ und nichts verändert. Der
Antrieb des Ausgangs “2“ bewegt sich nun. Drücken Sie noch mal zum “Überspringen“
den Programmiertaster. Nun gelangen Sie zum Ausgang “3“. Wenn Sie nun an Ihrem
Steuergerät (PC) die Taste “grün“ anstatt vorher “rot“ (oder anders herum) der
entsprechenden Digitaladresse drücken, reagiert der Antrieb !nur! an
diesem Ausgang anders herum.
Sie
müssen den Programmiervorgang beenden, indem Sie noch mal den Programmiertaster
drücken. Im hier angegebenem Beispiel
würde sich jetzt der Antrieb des vierten
Ausganges bewegen. Durch nochmaliges Drücken des Programmiertasters
gelangen Sie wieder in den normalen Modus zurück.
Natürlich
können Sie auch an dem relevantem Ausgang die Anschlußkabel vertauschen. Es
kommt immer darauf an was im Einzelfall einfacher ist.
Der Programmiervorgang
kann beliebig oft wiederholt werden, so dass Sie jederzeit die Möglichkeit
haben den einzelnen Ausgängen neue Adressen zuzuweisen.
Es empfiehlt sich den
Decoder vor dem Einbau vor Ort direkt an der Zentrale zu programmieren. So hat
man die Möglichkeit recht komfortabel die gewünschten Funktionen zunächst zu
prüfen.
Die Antriebe
In
Abhängigkeit der verwendeten Antriebe sind die Verfahrenszeiten höchst
unterschiedlich. Ab einer Schaltzeit von ca. 150 m sec. stellen die Antriebe
von Conrad sicher um. Bei Hoffmann beträgt die Verfahrenszeit, je nach mechanischer
Einstellung am Antrieb, ca. 200 m sec.-1 sec. Bei Fulgurex sind es ca. 4 sec.
Es gibt Zentralen und auch
Computerprogramme, bei denen können die Mindestschaltzeiten für angeschlossene
Weichen eingestellt werden. Sollten Sie eine solche Zentrale bzw. Programm
verwenden, so können Sie die min. Schaltzeit auf der Werkseinstellung
belassen. Unabhängig von der
Einstellung für die Stellzeiten liefert der Decoder immer einen Steuerimpuls
der ca. 5 sec. lang ist. Das reicht für alle Antriebe aus um sicher umzulegen.
Danach wird der Strom abgeschaltet. Folglich sind die Antriebe im Ruhezustand
stromlos. Auf diese Weise werden die in
den Antrieben vorhandenen Endabschalter entlastet.
Einige
Motorantriebe haben lediglich zwei Kabel zum Anschluß an die jeweilige
Zweierklemme des Decoders, z.B Bemo/Herkat, Feather, Fulgurex/Lemaco, LUX, NMW oder Tortoise.
Es
gibt aber auch eine Reihe von motorischen Antrieben an denen drei Kabel bzw.
drei Anschlussklemmen vorhanden sind. Hier müssen Sie zunächst aus drei Kabeln
bzw. Klemmen “zwei“ machen. Nachfolgen finden Sie eine beispielhafte
Aufstellung von gängigen Antrieben mit der Beschreibung, welche Kabel sie
verbinden müssen.
Böhler
WA-2 - verbinden Sie die Klemmen 7+8 miteinander.
(Den
Antrieb Böhler WA-1 können Sie mit diesem Decoder nicht schalten!)
Conrad
- verbinden Sie die beiden Kabel mit den Dioden zu einem Kabel.
Hoffmann
– verbinden Sie die Klemmen R+L miteinander.
Hübner-
verbinden Sie die Klemmen 1+9 miteinander.
Pilz/Tillig
– verbinden Sie das gelbe mit dem rosanem Kabel zu einem Kabel.
Es
besteht durchaus die Möglichkeit an den Decoder Antriebe verschiedener
Hersteller gleichzeitig anzuschließen. Es müssen deshalb nicht einheitlich
Motorantriebe eines Herstellers verwendet werden.
Beachten
Sie jedoch unbedingt die Herstellerangaben bezüglich der Betriebsspannungen.
Diese sind nämlich höchst
unterschiedlich und reichen von 5-18 V.
Sollten
Sie Antriebe verwenden die z.B. alle einheitlich eine wesentlich geringere
Betriebsspannung als 12-18 V haben, so können Sie die Speisespannung des
Decoders entsprechend reduzieren. Verwenden Sie anstatt eines Transformators
von 16V~ einen mit einer entsprechend geringeren Spannung. Alternativ können
Sie auch einen Fahrtrafo für den
analogen Fahrbetrieb benutzen, dessen Ausgangsspannung stufenlos einstellbar
ist. Stellen Sie hier dann einfach die
gewünschte Spannung ein.
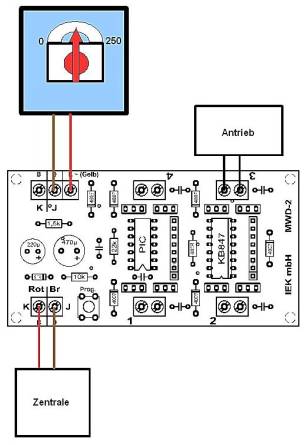
Reduzierung der
Betriebsspannung durch Verwendung eines einstellbaren Transformators
Weiterhin können Sie die
Betriebsspannung entsprechend
verringern, indem Sie eine
Diodenkaskade in Reihe zu der Anschlussleitung schalten. Das sind jeweils zwei
antiparallel geschaltete Dioden. In Abhängigkeit der Anzahl der Dioden
reduziert sich die tatsächlich Spannung dann pro Paar jeweils um ca. 0,7 V.
Diese Maßnahme ist nur einmal für alle an den Transformator angeschlossenen
Decoder erforderlich. Zur Spannungsreduzierung ist das Vorschalten eines
Widerstandes anstatt einer Diodenkaskade nicht empfehlenswert. Der Decoder
arbeitet zuverlässig in einem Spannungsbereich von
10-20 V~.
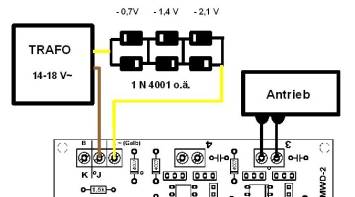
Reduzierung der
Betriebsspannung durch Verwendung einer Diodenkaskade
Sollte es, aufgrund von
Antrieben verschiedener Hersteller, erforderlich sein an den einzelnen
Ausgängen des Decoders verschiedene Spannung zu haben, dann können Sie entweder
an jedem einzelnem Ausgang mit den beschriebenen Diodenkaskaden die Spannung
entsprechend reduzieren. Alternativ können Sie auch mit je zwei Zenerdioden,
1,3W, die Spannung um den Wert der
Zenerdiode entsprechend reduzieren. Dazu müssen Sie eine Zenerdiode antiparallel, in Reihe mit jeweils einem
Anschlussdraht schalten.
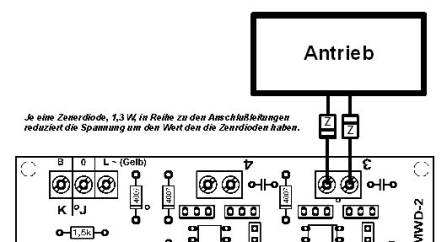
Reduzierung der
Betriebsspannung für einzelne Antriebe durch Verwendung von zwei Zenerdioden
antiparallel, in Reihe zu den Anschlussleitungen
Sofern beim Betrieb der
Motorantriebe Störungen entstehen
sollten, so löten Sie in die Freistellen auf dem Decoder neben den
Anschlußklemmen Kondensatoren von 100 nF zur zusätzlichen Entstörung ein.
Der
Decoder ist NICHT massekompatibel. Das heißt, Sie können NICHT wie bei unserem
Modell MWD-1 neben der digitalen Ansteuerung
zusätzlich eine parallele, gleichzeitige, analoge Steuerung z.B. mit
einem Stellpult oder einem Gleisbesetztmelder o.ä. realisieren. Die angeschlossenen
Antriebe können deshalb ausschließlich mit dem Decoder angesteuert werden!!
Technische Daten
Baustein
Datenformat: Motorola
Adressvorrat: 320 Einzeladressen
Max.
Ausgangsstrom, Impulsbetrieb:
1,5 A
Max. externe
Betriebsspannung: 20 V~
Funktion :
Baugruppe, 4 zeitgesteuerte Spannungsausgaben,
positiv/negativ umpolend.
Maße: ca. 49x93 mm
Die hier
genannten Namen können eingetragene Warenzeichen der jeweiligen Firmen sein.
Aufgrund der lediglichen Nennung ist nicht der Schluss zu ziehen, daß Waren-
und Markenzeichen nicht durch Rechte Dritter geschützt sind!